下記ブログ記事に記載したイベントで、Arduino UNO QのZephyrの「Linkable Loadable Extensions」が、基盤ファームウェアを書き換えることなくユーザーのスケッチを動的にデプロイできる仕組みと紹介されていた。本記事ではZephyrについて概要を調べたので紹介する。

(注)本記事の内容は正確性を保証するものではない。
(2025年12月19日 追記)YouTube動画を追加しました。 https://youtu.be/0LyjX3LA9TQ
よくある質問から紐解くUno Qの核心技術
Arduino Uno Qの登場は、組込み開発の世界に新たなアーキテクチャの選択肢を提示しました。
その核心は、産業グレードのリアルタイムOS「Zephyr」の採用と、それによってもたらされる革新的な機能群にあります。
本稿では、まずこの新技術に関する最も核心的な疑問に、アーキテクトの視点からQ&A形式で直接お答えすることから始めます。
Zephyrの概要
Arduino UNO QではZephyrの「Linkable Loadable Extensions」が利用でき、基盤ファームウェアを書き換えることなくユーザーのスケッチを動的にデプロイできると聞きました。これによりクリティカルなタスクを止めることなくアプリケーションの入れ替えが可能になるとのことですが、Zephyr自体を知らないので、そこから解説してください。
Gemini 3 Proの回答
その情報は正確であり、組込みシステムの設計思想を根底から変えうる、非常に重要な機能です。
まず、Zephyr RTOSの役割から解説しましょう。
1. そもそも「Zephyr(ゼファー)」とは?
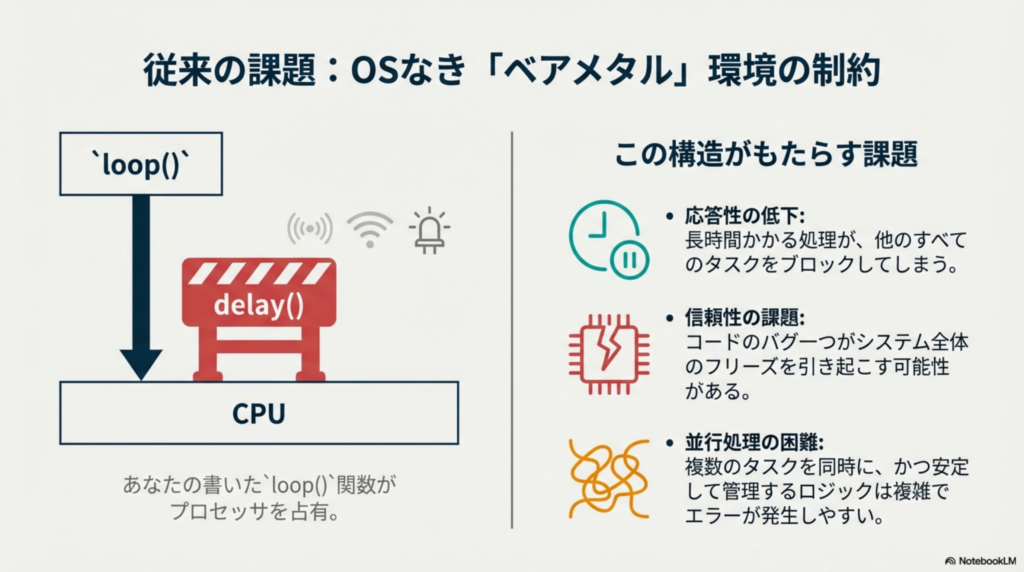
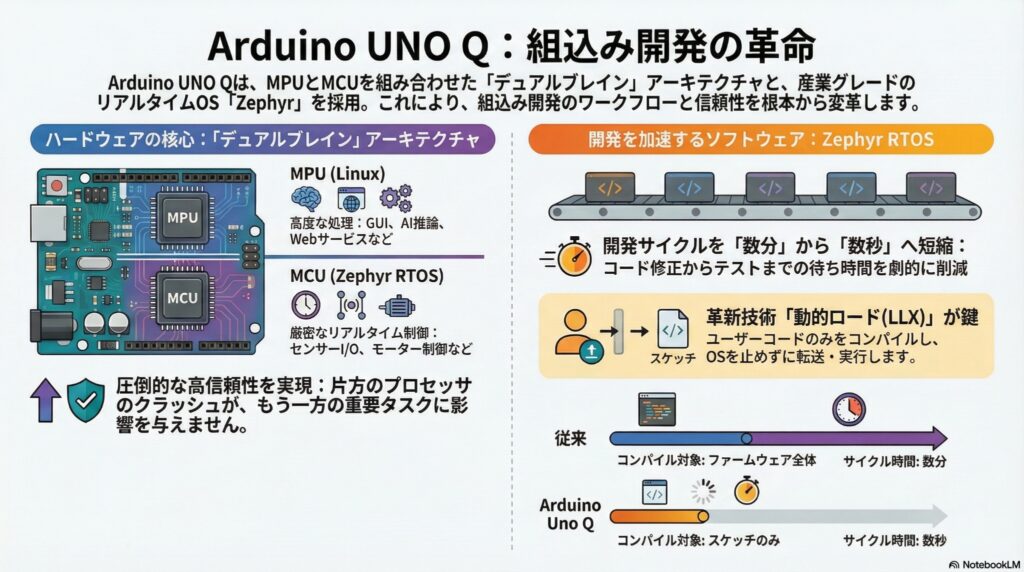
一言で言えば、組込みシステム専用の、高度な「スケジューラ兼リソースマネージャ」です。
従来のArduinoはOSを持たない「ベアメタル」環境で動作します。あなたの書いたloop()関数がプロセッサを占有するため、delay()や時間のかかる処理は他のすべてのタスクをブロックしてしまいます。
対してZephyrは、ハードウェアとあなたのコードの間に介在するRTOS(リアルタイムOS)です。
これは、各タスクを独立した「スレッド」として管理し、優先度に基づいてCPU時間を割り振るプリエンプティブ・スケジューラとして機能します。
例えば、時間のかかる処理を低優先度スレッドで実行させておけば、より優先度の高い安全センサーの監視スレッドが常に即時実行されることをOSが保証します。これにより、システムの応答性と信頼性が飛躍的に向上するのです。
2. Linkable Loadable Extensions (LLX)とは?
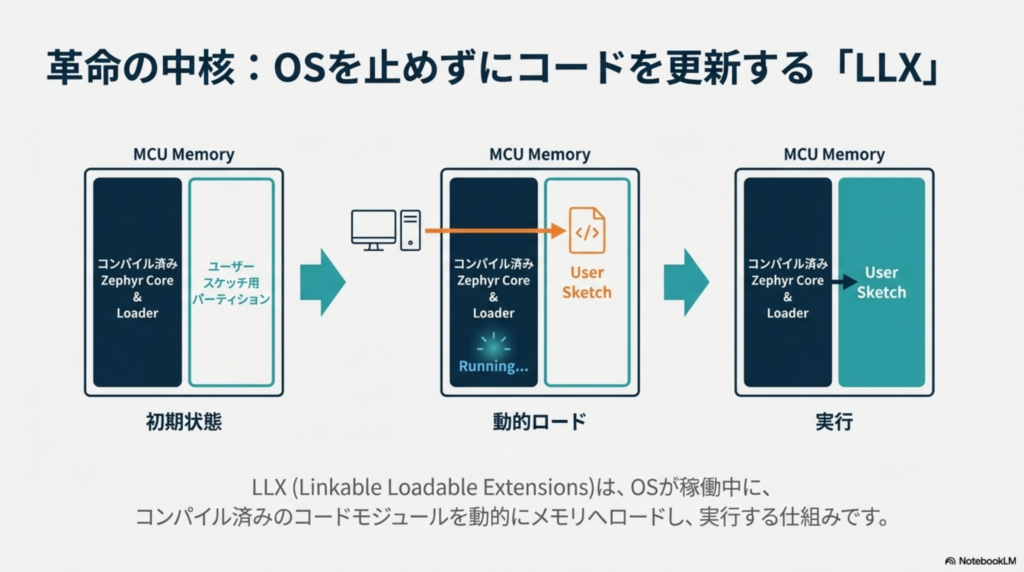
LLXはZephyrの機能の一つで、OSが稼働中に、コンパイル済みのコードモジュールを動的にメモリへロードし、実行する仕組みです。
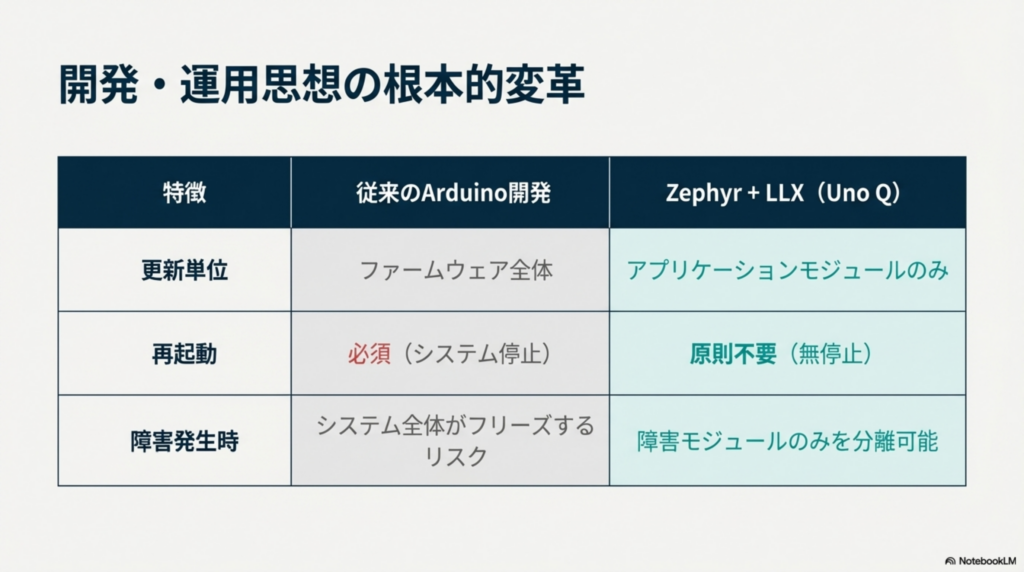
従来の組込み開発では、コードを1行でも変更すればファームウェア全体を再コンパイルし、システムを停止して書き込み、再起動する必要がありました。LLXはこのサイクルを根本から変えます。
- 基盤ファームウェア: OSカーネルやドライバなど、システムの核となる部分は変更しません。
- 拡張モジュール(スケッチ): あなたが開発したアプリケーションロジックのみを独立したバイナリとしてコンパイルします。
- 動的ロード: 基盤システムを稼働させたまま、このモジュールだけをメモリにロードして実行を開始します。
3. なぜこれが画期的なのか?
このアーキテクチャがもたらすメリットは、単なる利便性を超えた、システム設計上の大きな価値を持ちます。
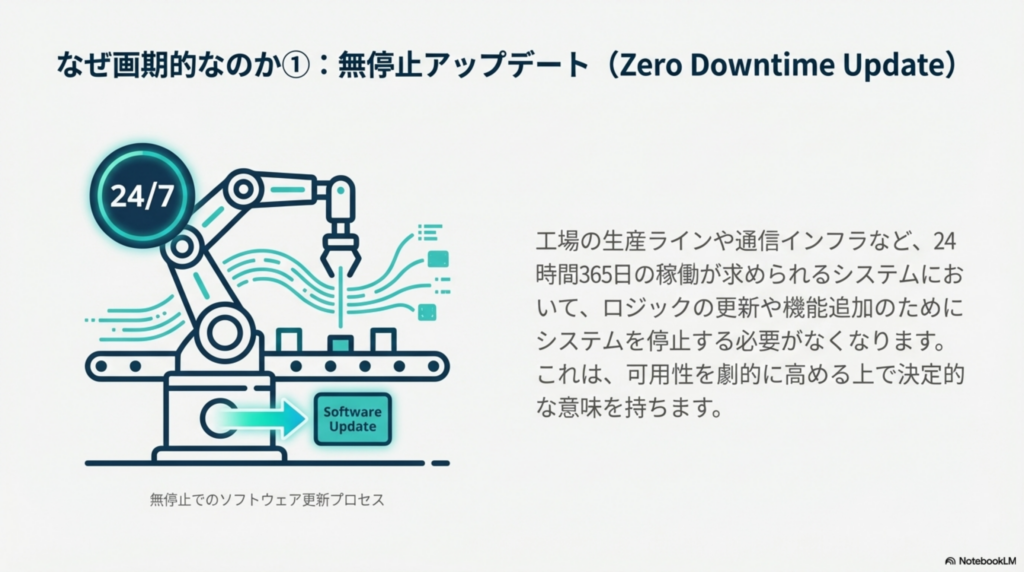
- A. 無停止アップデート (Zero Downtime Update): 工場の生産ラインや通信インフラなど、24時間365日の稼働が求められるシステムにおいて、ロジックの更新や機能追加のためにシステムを停止する必要がなくなります。
これは、可用性を劇的に高める上で決定的な意味を持ちます。
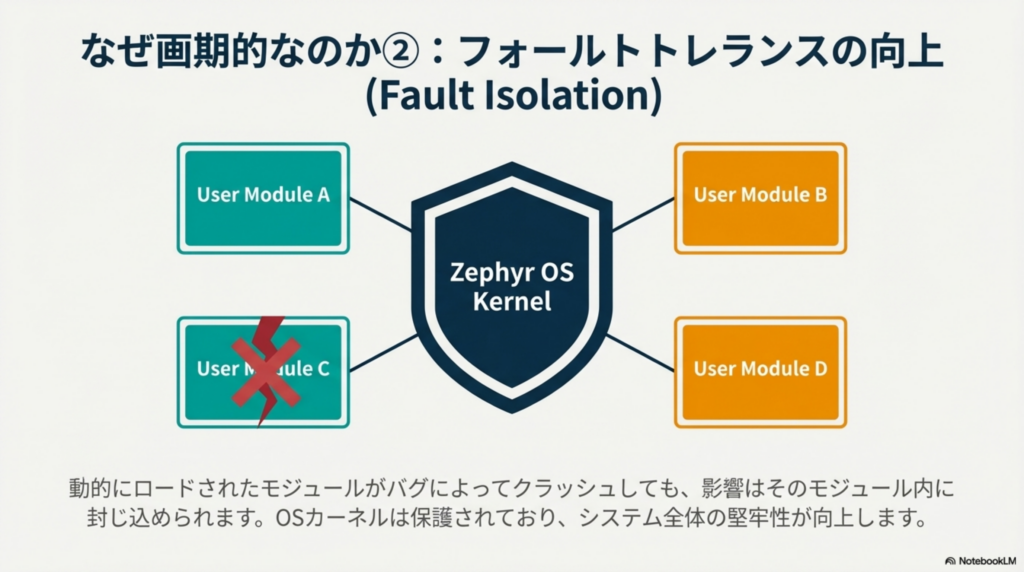
- B. フォールトトレランスの向上 (Fault Isolation): 動的にロードされたモジュールがバグによってクラッシュしても、影響はそのモジュール内に封じ込められます。
OSカーネルは保護されており、クラッシュしたモジュールのみを安全に停止・再起動させることが可能です。
これにより、システム全体の堅牢性が向上します。
——————————————————————————–
稼働中のOSに外部からプログラムを注入する仕組みについて、より技術的に詳しく教えてください。例えば、旧コードと置き換える新コードを別領域にロードし、あるタイミングで実行先を切り替える、というイメージで合っていますか?
Gemini 3 Proの回答
そのイメージは、技術的にも非常に的確です。まさに「現在のコードが実行されている隣のメモリ空間で新コードの実行準備を整え、完了した時点で実行パスを一瞬で切り替える」という動作をしています。このプロセスは、OSのコア技術である「動的リンク(Dynamic Linking)」と「リロケーション(Relocation)」によって実現されます。
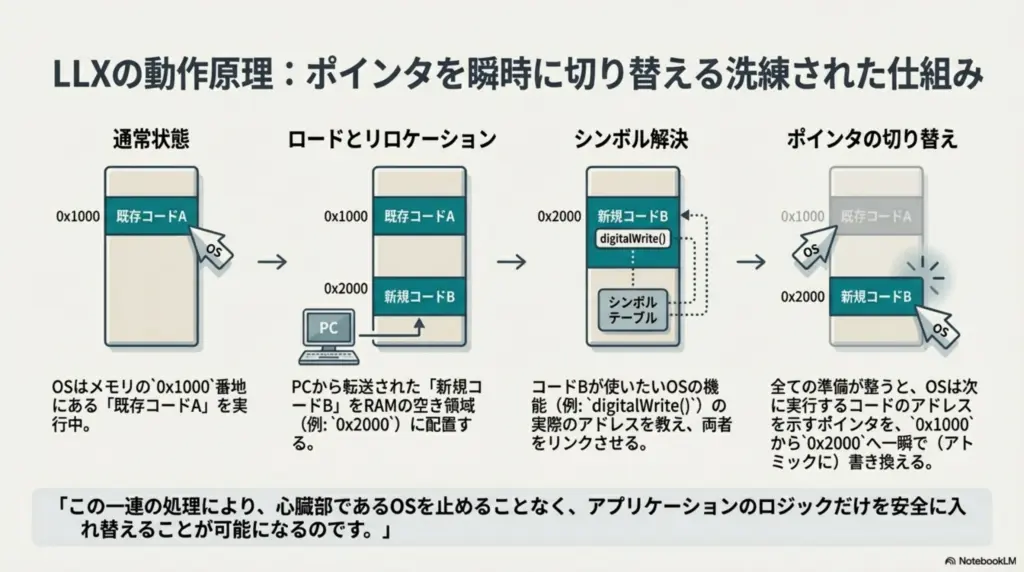
- 通常状態: 基盤ファームウェア(Zephyr OS)が稼働中。あるタスクを実行する際、そのタスクの開始アドレス(例:0x1000)を指す関数ポインタに従い、既存のコードAが実行されます。
- ロードとリロケーション: PCから新しいコードBのバイナリが転送されると、ZephyrはRAMの空き領域(例:0x2000)にそれをロードします。コードBはコンパイル時点では自身の配置アドレスを知らないため、Zephyrのローダーが「あなたのアドレスは0x2000です」と教え、コードB内部のメモリアドレス参照をすべて0x2000を基点とするように解決(リロケーション)します。
- シンボル解決とリンク: コードBがdigitalWrite()のようなOSの機能を使いたい場合、ローダーはOSが持つシンボルテーブルを参照し、digitalWrite()関数の実際のアドレスをコードBにリンクします。
- ポインタの切り替え: すべての準備が整うと、OSはアトミック操作(中断されない処理)で、タスクの関数ポインタを旧アドレス0x1000から新アドレス0x2000へと書き換えます。これにより、次回のタスク実行時から新コードBが呼ばれるようになります。
この一連の処理により、心臓部であるOSを止めることなく、アプリケーションのロジックだけを安全に入れ替えることが可能になるのです。
——————————————————————————–
<質問> 新旧両方のコードをRAMに展開する必要があるため、コードサイズが制限されるという短所はありますか?また実装に手間がかかるなどのデメリットについても教えてください。
Gemini 3 Proの回答
ご指摘の通り、この強力な機能には明確なトレードオフが存在します。最大の課題は「メモリリソースの制約」と「実装の複雑性」です。
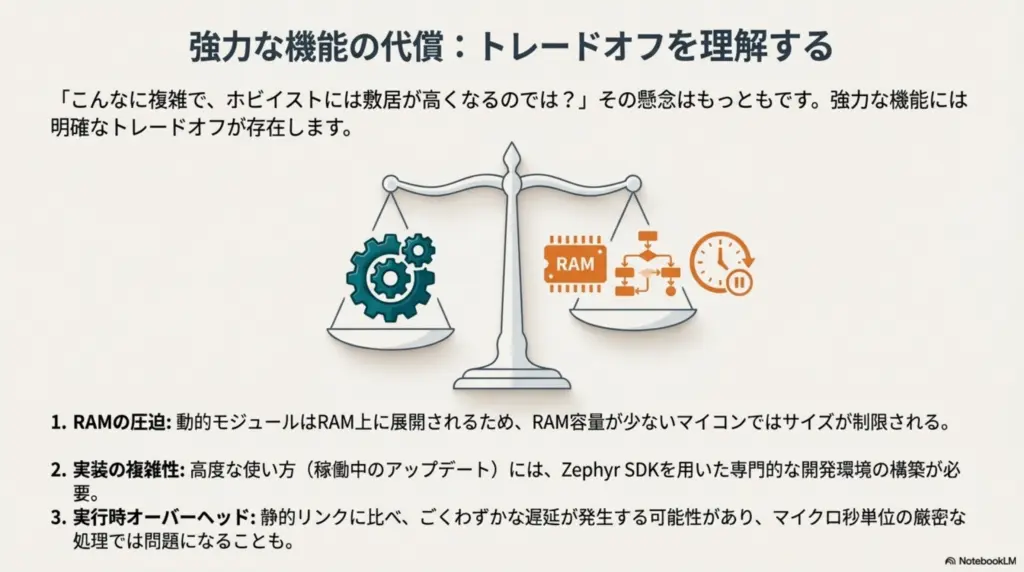
短所1:RAMの圧迫
動的ロードされるモジュールはRAM上に展開されるため、RAM容量が少ないマイクロコントローラでは、ロードできるコードのサイズが厳しく制限されます。大規模なモジュールの動的な入れ替えは現実的ではありません。
短所2:実装の複雑性
この高度な機能は、「Arduino IDEでボタン一つ」で実現できるものではありません。Zephyr SDKを用いた専門的な開発環境の構築や、基盤OSとモジュール間のABI(Application Binary Interface)互換性を厳密に管理する必要があり、開発の難易度は格段に上がります。
短所3:実行時オーバーヘッド
動的リンクされた関数呼び出しは、静的リンクに比べて僅かながらオーバーヘッド(間接参照など)を伴います。マイクロ秒単位の厳密なタイミングが要求されるハード・リアルタイム処理では、この遅延が問題になる可能性があります。
【重要】Uno Qのデフォルトワークフローに関する補足
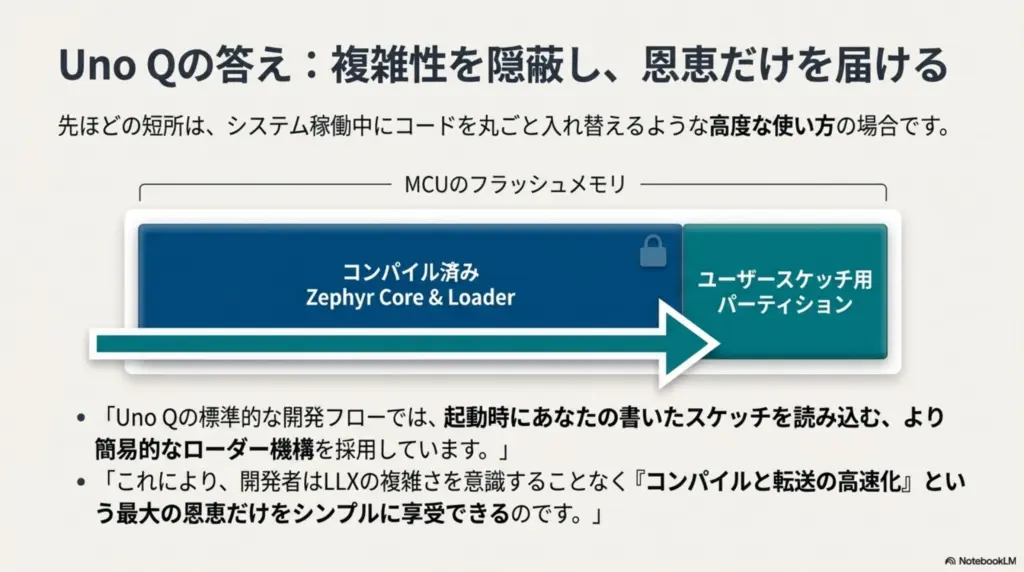
ただし、ここで重要な点を補足します。上記はシステム稼働中にコードを入れ替える高度なLLXの応用例における短所です。Arduino Uno Qの標準的な開発サイクルでは、この複雑性は隠蔽されています。
Uno Qは、起動時にユーザーのスケッチをロードする簡易的なローダー機構を採用しており、これにより開発者はLLXの複雑さを意識することなく「コンパイルと転送の高速化」という恩恵だけを享受できます。
——————————————————————————–
電源投入時、Linuxが立ち上がるまで待たされるが、Arduino Uno Qの標準的な開発サイクルでは、「コンパイルと転送の高速化」の恩恵が受けられ、スケッチの修正〜コンパイル〜実行のサイクルが早くなるとのこと。
Arduino Uno Qの全体像
このQ&Aで核心技術に触れたところで、本記事ではArduino Uno Qの全体像をより体系的に解説していきます。
1. Uno Qがもたらす3つの革命

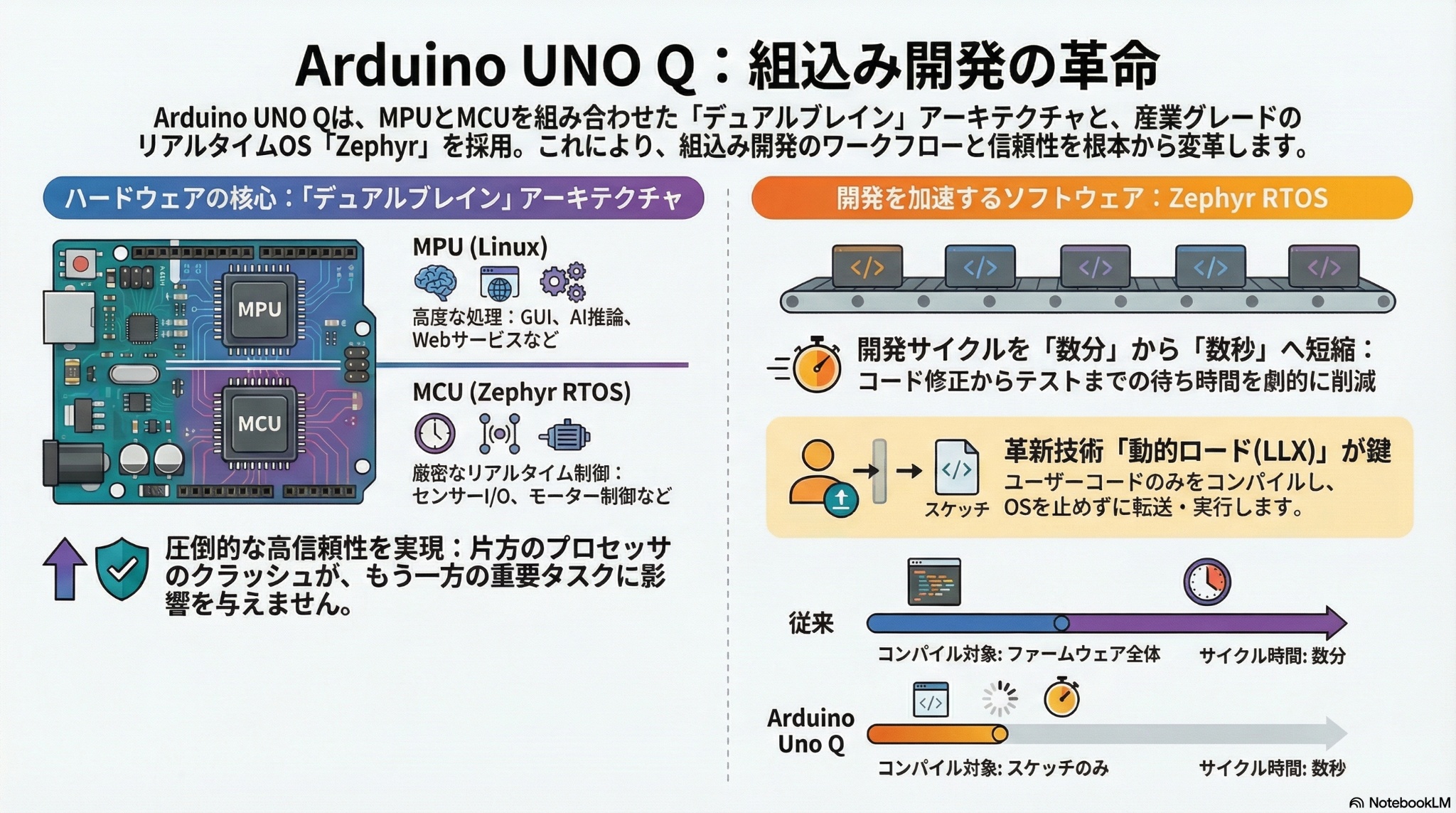
Arduino Uno Qは、単なるスペックの向上に留まらない、組込み開発のパラダイムを根本から変える可能性を秘めたボードです。その変革は、主に3つの核心的なイノベーションによって定義されます。
- ハイブリッド・アーキテクチャ (Hybrid Architecture)
Linuxが動作するMPU(マイクロプロセッサ)と、Zephyr RTOSが動作するMCU(マイクロコントローラ)を融合。これにより、高度なアプリケーション処理と、決定的(予測可能)なリアルタイム制御との間のギャップを埋めます。 - 加速するワークフロー (Accelerated Workflow)
ZephyrのLLX (Linkable Loadable extensions)技術を応用したローダー機構により、ユーザーコード(スケッチ)のみを動的にロード。ファームウェア全体の再コンパイルが不要となり、開発・デプロイのサイクルを劇的に短縮します。 - 柔軟な開発スペクトラム (Flexible Development Spectrum)
開発者は使い慣れたArduino APIから開発を始め、必要に応じて高度なRTOS機能へと段階的に移行できます。
最終的には純粋なZephyr開発まで、すべてを単一のボード上でシームレスに実現可能です。
これらの革命を理解するためには、まずそれを可能にするハードウェアの基盤から見ていく必要があります。
2. ハードウェアの基盤:「デュアルブレイン」アーキテクチャ
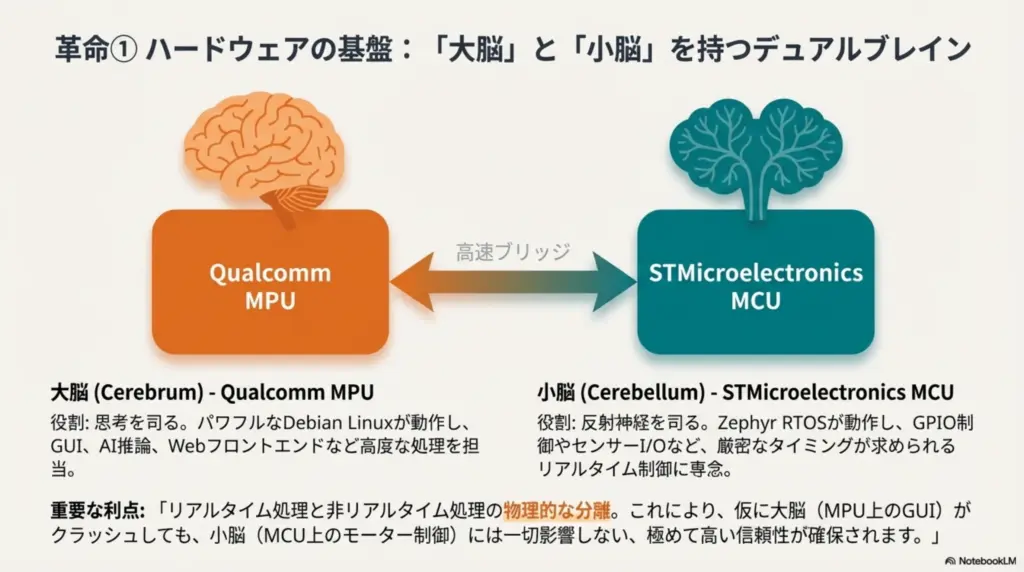
Uno Qの戦略的な核心は、高性能コンピューティングとミッションクリティカルなリアルタイムタスクを物理的に分離する「デュアルブレイン」アーキテクチャにあります。この設計思想が、前述した革命の技術的基盤となっています。
| コンポーネント | 仕様 | 主な役割 |
| MPU | Qualcomm Dragon Wing (クアッドコアCPU) | Debian Linuxを実行。 GUI、AI推論、Webフロントエンド、ビデオパイプラインなど高レベルな処理。 |
| MCU | STMicroelectronics STM32U5 (ARM Cortex-M33) | Zephyr RTOSを実行。 GPIO制御、センサーI/Oなど、リアルタイム性が要求される低レベルなハードウェア制御。 |
このアーキテクチャの真価は、タスクの性質に応じた役割分担にあります。MPUはPythonなどを利用したリッチなUIやAI推論、Webサービスといった非決定的な高レベル処理を担当します。
一方、MCUはC/C++を用いてセンサーからのデータ取得やモーター制御といった、厳密なタイミングが求められる決定的なタスクに専念します。
アーキテクトの視点から言えば、これは堅牢な組込み設計の基本原則、すなわち「リアルタイム制御ドメインと非リアルタイム処理ドメインの分離」を物理レベルで実現したものです。
これにより、仮にMPU上のGUIがクラッシュしたとしても、MCUで実行されている安全監視のようなミッションクリティカルなタスクには一切影響を与えない、という極めて高い信頼性が確保されます。
両者は高速なUARTブリッジを介してRPC(Remote Procedure Call)で通信します。
この先進的なアーキテクチャを採用しつつも、Uno Qは従来のUnoフォームファクターとシールド互換性を維持しています。これは、既存の膨大な資産を持つユーザーがスムーズに次世代プラットフォームへ移行できるという、戦略的に重要な利点です。
この強力なハードウェア基盤の上に、どのようなソフトウェアが構築されているのかを見ていきましょう。
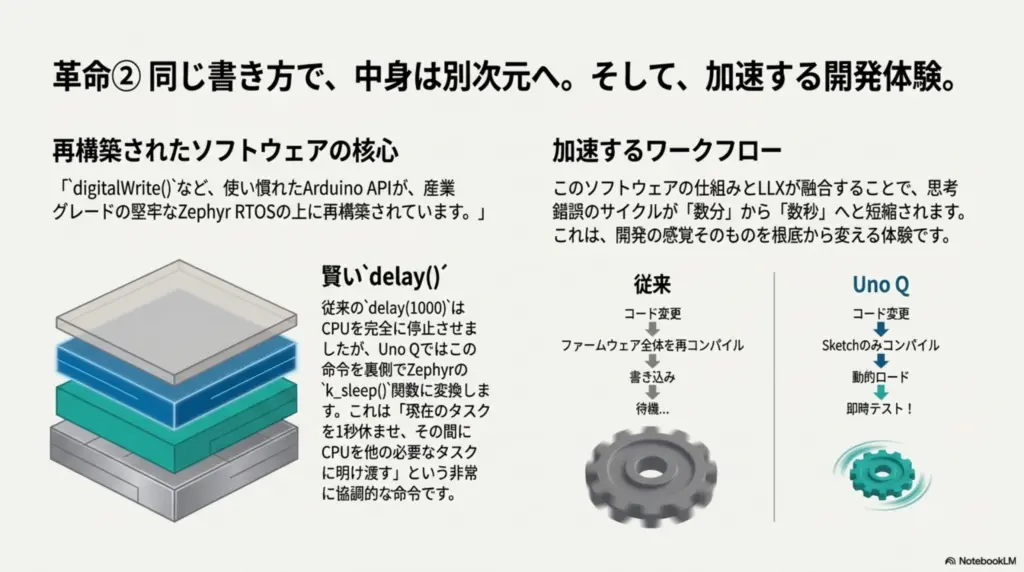
3. ソフトウェアの核心:Zephyr基盤上のArduino
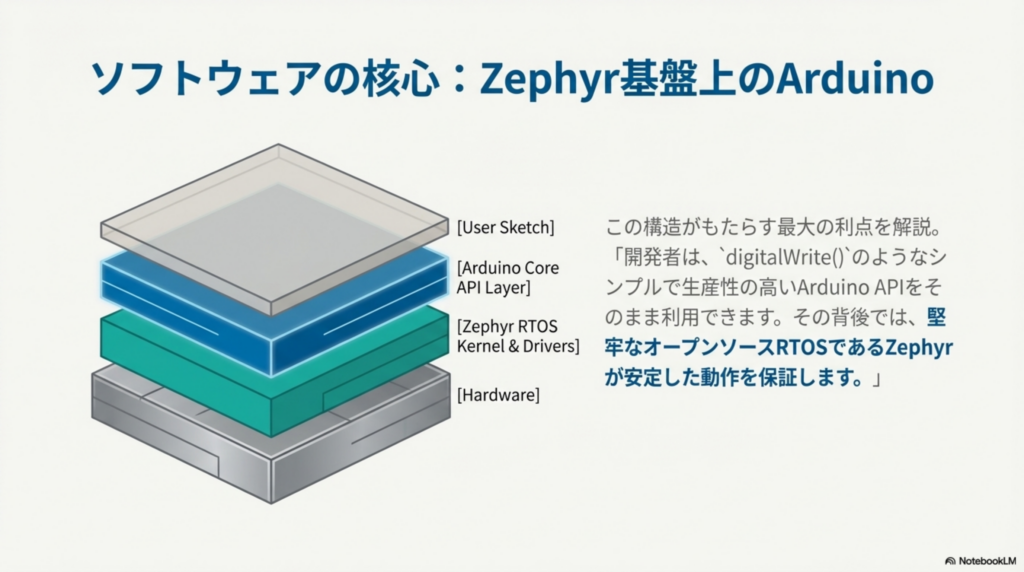
Arduino Uno Qの真の革新は、そのソフトウェアアーキテクチャにあります。長年親しまれてきたArduinoの開発体験が、産業グレードの堅牢なリアルタイムOS(RTOS)であるZephyrの上に再構築されているのです。
ソフトウェアスタックは以下の階層構造で構成されています。
- User Sketch
- Arduino Core API Layer
- Zephyr RTOS Kernel & Drivers
- Hardware
この構造がもたらす最大の利点は、開発者がこれまで通りシンプルで生産性の高いdigitalWrite()のようなArduino APIをそのまま利用できる点です。しかしその背後では、堅牢なZephyr RTOSがスレッド管理や厳密なスケジューリングといった複雑なタスクを処理し、システムの安定動作を保証します。
例えば、従来のArduinoでdelay(1000);を呼び出すと、プロセッサは1秒間完全に停止し、他の処理は何もできませんでした。しかしUno Qでは、Arduino Core APIがこの呼び出しをZephyrのk_sleep()関数に変換します。
これは「現在のスレッドを1秒間スリープさせ、その間CPUを他のスレッドに明け渡す」という命令です。
これにより、コードの一部が待機中であってもシステム全体は応答性を失わず、並行処理が可能になるのです。
このソフトウェアアーキテクチャが、具体的にどのように開発サイクルを加速させるのかを次に解説します。
4. 開発サイクルを数分から数秒へ:動的ロードがもたらすインパクト
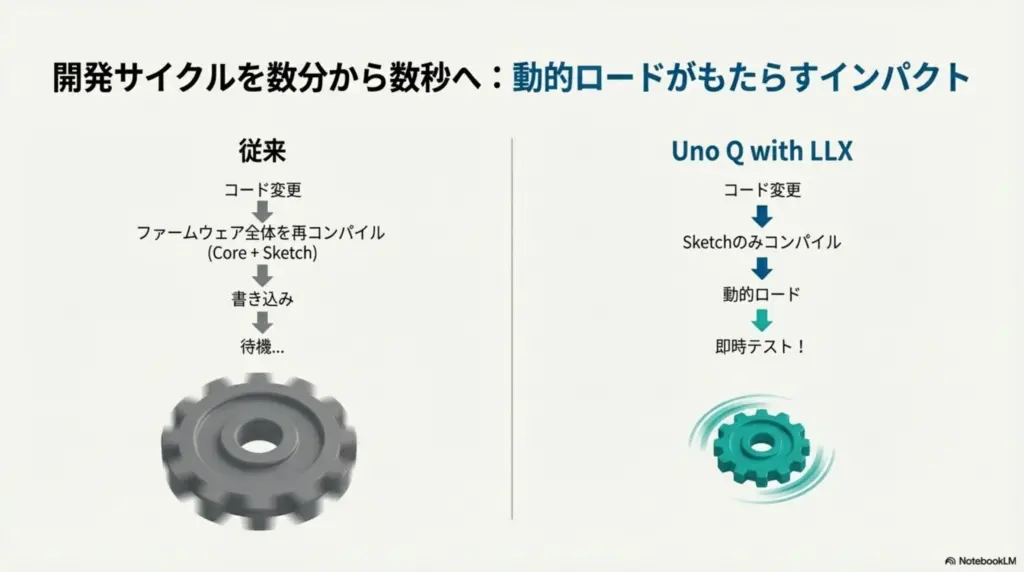
Uno Qのアーキテクチャがもたらす最も実用的な恩恵の一つが、開発ワークフローの劇的な高速化です。これは、従来の組込み開発における時間のかかるコンパイル・書き込みサイクルを根本から覆すものです。
従来 コード変更 -> ファームウェア全体を再コンパイル (Core + Sketch) -> 書き込み -> 待機…
Uno Q with LLX コード変更 -> Sketchのみコンパイル -> 動的ロード -> 即時テスト!
この高速化を実現しているのが、LLXの技術を応用したローダーメカニズムです。
MCUのフラッシュメモリは、あらかじめ「コンパイル済みZephyr Core & Loader」が書き込まれた領域と、「ユーザースケッチ用パーティション」に分割されています。
開発者が転送するのは自身のスケッチのみであり、ボード起動時にプリインストールされたローダーがそれを動的にロードして実行します。
これにより、組込み開発のフィードバックループが根本的に変わります。
小さな変更をテストする際の認知コストが、集中力を失うのに十分な「数分」から、思考を中断しない「数秒」へと短縮されます。
これは、ソフトウェア開発に近い感覚での高速なイテレーションと実験を促進し、生産性を飛躍的に向上させます。
この革新的なワークフローは、開発者がスキルやプロジェクトの要求に応じて、柔軟な開発アプローチを選択することを可能にします。
5. あなたの進むべき道:スキルに応じた開発アプローチの選択
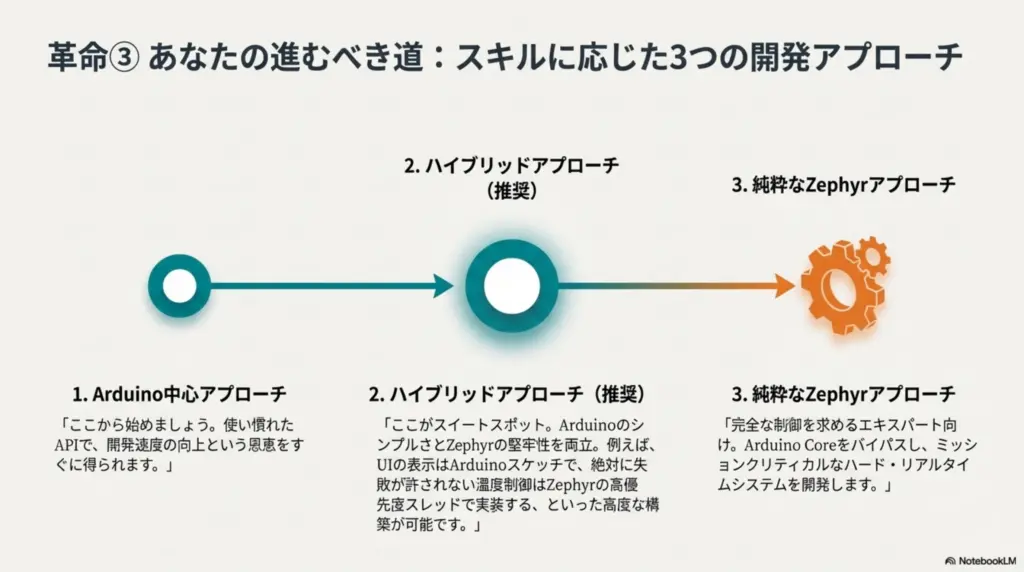
Uno Qの優れた点は、単一のプラットフォーム上で複数の開発パスを提供していることです。これにより、初心者から熟練したエキスパートまで、あらゆるレベルの開発者が自身のスキルセットに最適な方法でボードの能力を最大限に引き出すことができます。
- Arduino中心アプローチ (Arduino-centric Approach) すべてのユーザーの出発点です。
使い慣れたArduino APIとシンプルなloop()構造を利用して、迅速なプロトタイピングを行います。
従来のArduino開発と変わらない恩恵をすぐに得られます。 - ハイブリッドアプローチ (推奨) (Hybrid Approach – Recommended) このアプローチがUno Qの「スイートスポット」です。
Arduinoのシンプルさを維持しつつ、並行処理やリアルタイム性が求められる部分にZephyrのスレッドや同期プリミティブを導入します。
例えばスマートサーモスタットのようなデバイスに最適です。
ユーザーインターフェースのロジックはArduinoスケッチとして簡潔に記述し、一方でクリティカルな温度制御アルゴリズムは高優先度のZephyrスレッドで実行します。
これにより、UIの更新処理が温度制御のタイミングに影響を与えることが絶対にない、という信頼性の高いシステムを保証できます。 - 純粋なZephyrアプローチ (Pure Zephyr Approach) 完全な制御を求めるエキスパート向けのパスです。
Arduino Coreをバイパスし、Zephyr RTOSの機能を直接利用して、ミッションクリティカルなハード・リアルタイムシステムを開発します。
最高のパフォーマンスと最も厳密なタイミング制御が実現可能です。
この柔軟性を根底から支えているのが、プラットフォーム全体がオープンソースであるという思想です。
6. オープンソースがもたらす究極の自由
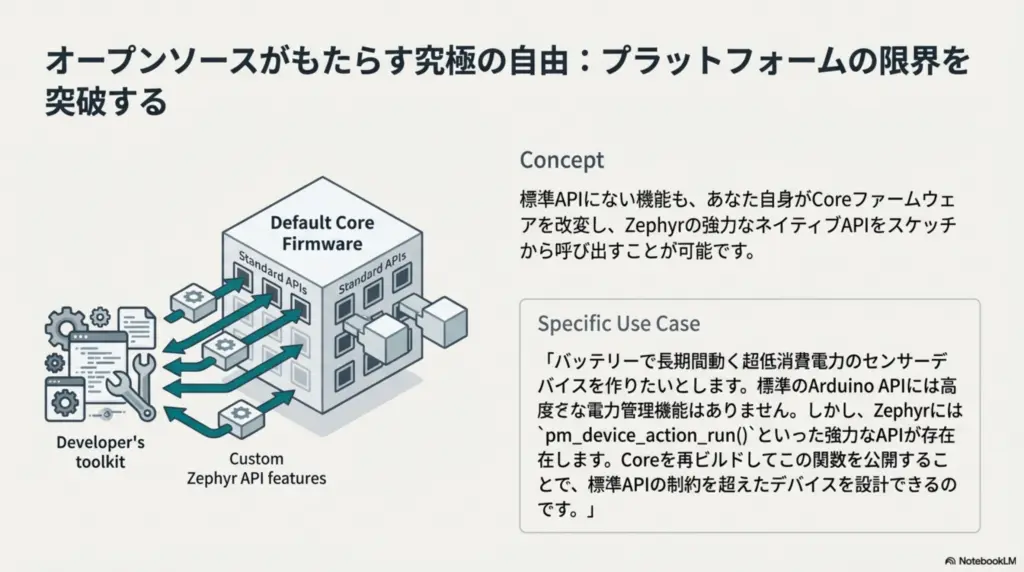
Uno Qのプラットフォームがオープンソースであることは、単なる技術的な詳細ではなく、開発者に究極のコントロールと柔軟性をもたらすという、その設計思想の核心部分を成すものです。
デフォルトのCoreファームウェアは標準的なArduino APIを公開していますが、プロジェクトによってはより高度なZephyr APIが必要になる場合があります。
その場合、開発者は公開されているソースコードを元に、自身でCoreファームウェアを再ビルドし、必要なカーネル機能をアプリケーションに公開(expose)できます。
これを具体的なユースケースで考えてみましょう。
例えば、バッテリー駆動のセンサーノードを開発しているとします。
標準のArduino APIには、MCUをディープスリープモードに移行させるような高度な電力管理機能は含まれていません。
しかし、Zephyrにはpm_device_action_run()といった強力な低電力管理APIが存在します。
開発者はCoreを再ビルドしてこの関数をスケッチから呼び出せるようにすることで、標準APIの制約を超えた、超低消費電力なデバイスを設計することが可能になるのです。
これは、アプリケーションの要件に応じてファームウェアを自由にカスタマイズし、パワフルかつ安全なシステムを構築する自由が、開発者の手に委ねられていることを意味します。
これらすべての特徴が融合し、Uno Qは単なるボードではなく、新しい開発エコシステムを形成しています。
7. 結論:ボードを超えて、エコシステムへ
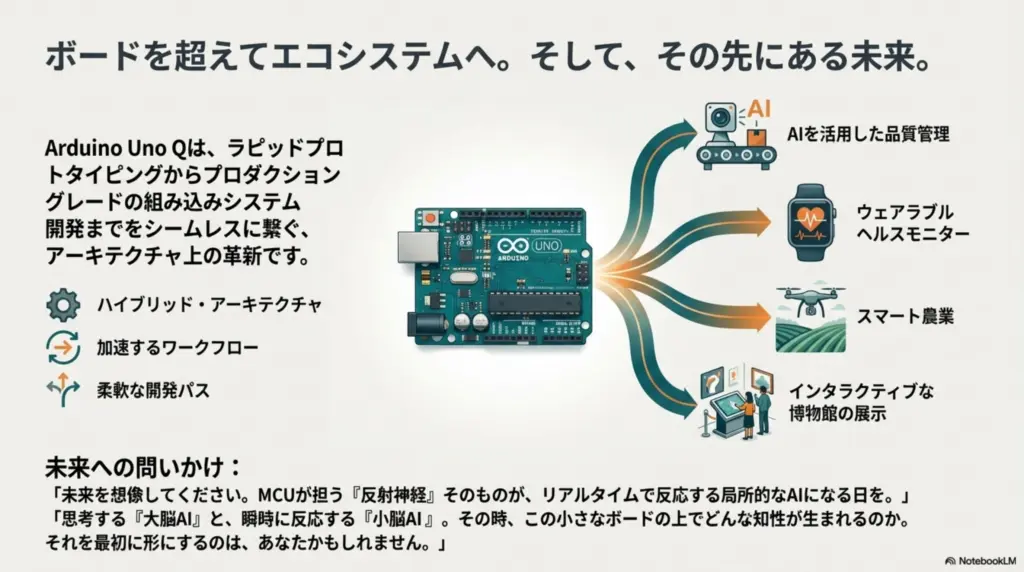
Arduino Uno Qは、単なる反復的な改良ではなく、組込み開発におけるアーキテクチャ上の革新です。
本稿で見てきたように、その核心は3つのテーマに集約されます。
- ハイブリッド・アーキテクチャ: 高性能なアプリケーション処理と厳密なリアルタイム制御を両立。
- 加速するワークフロー: 動的ロードにより、開発サイクルを数分から数秒へ短縮。
- 柔軟な開発パス: 初心者からエキスパートまで、スキルに応じた最適なアプローチを選択可能。
これらの要素が組み合わさることで、Uno Qはラピッドプロトタイピングからプロダクショングレードの組込みシステム開発までをシームレスに繋ぐ、スケーラブルな道を切り開きます。
AIを活用した品質管理システム、ウェアラブルヘルスモニター、スマート農業ネットワーク、インタラクティブな博物館の展示といった、これまで以上に高度で信頼性の高いアプリケーションの実現を、身近なArduinoプラットフォーム上で可能にするのです。
Uno Qは、ボードという物理的な存在を超え、次世代の組込み開発を支えるエコシステムの中心となるでしょう。